Stap 3, Lopen
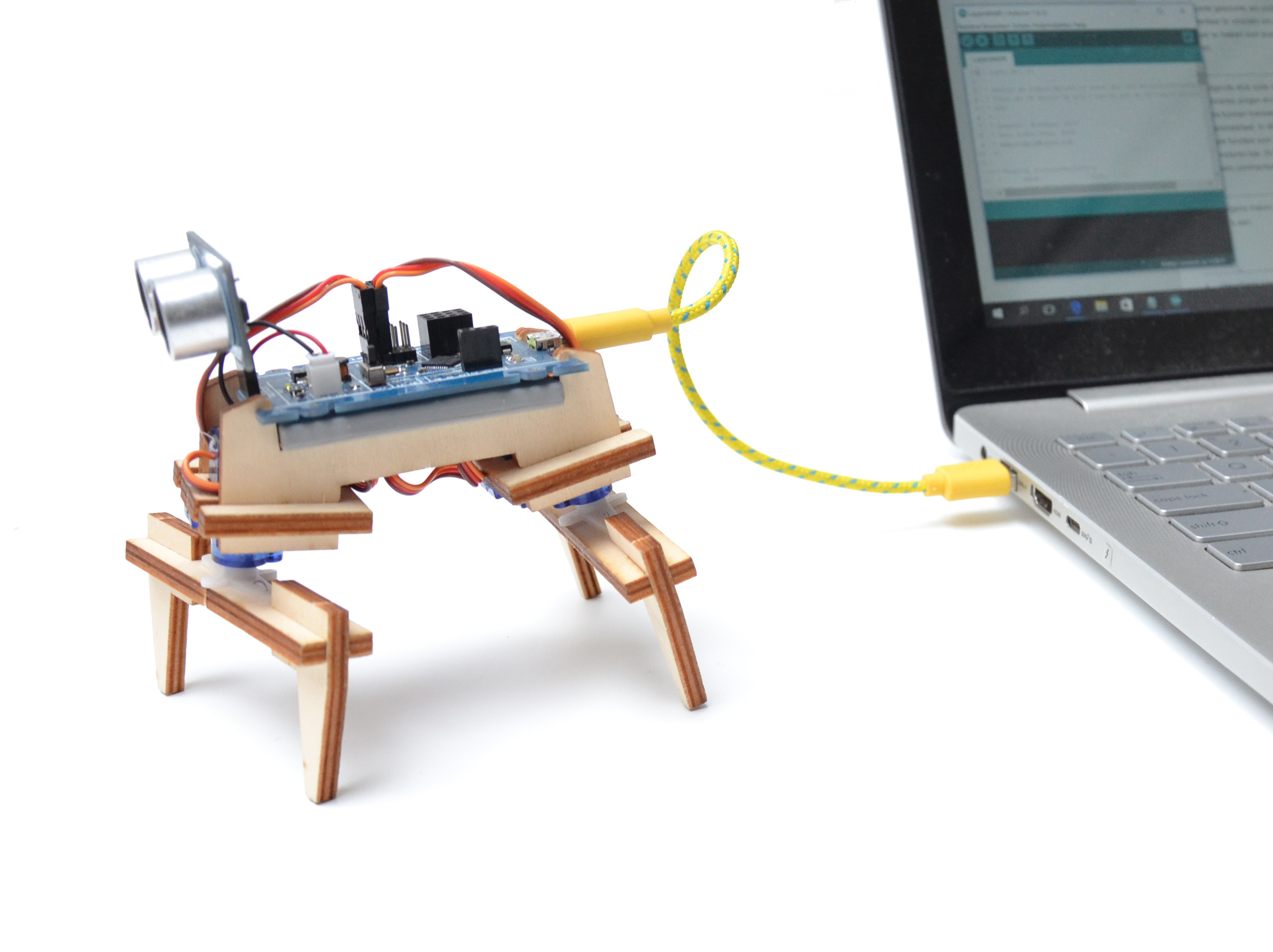
In deze stap leer je de Simple Walker lopen zoals in het volgende filmpje te zien is:
Hiervoor heeft de SimpleWalker heeft twee servomotoren. Deze zien er als volgt uit:
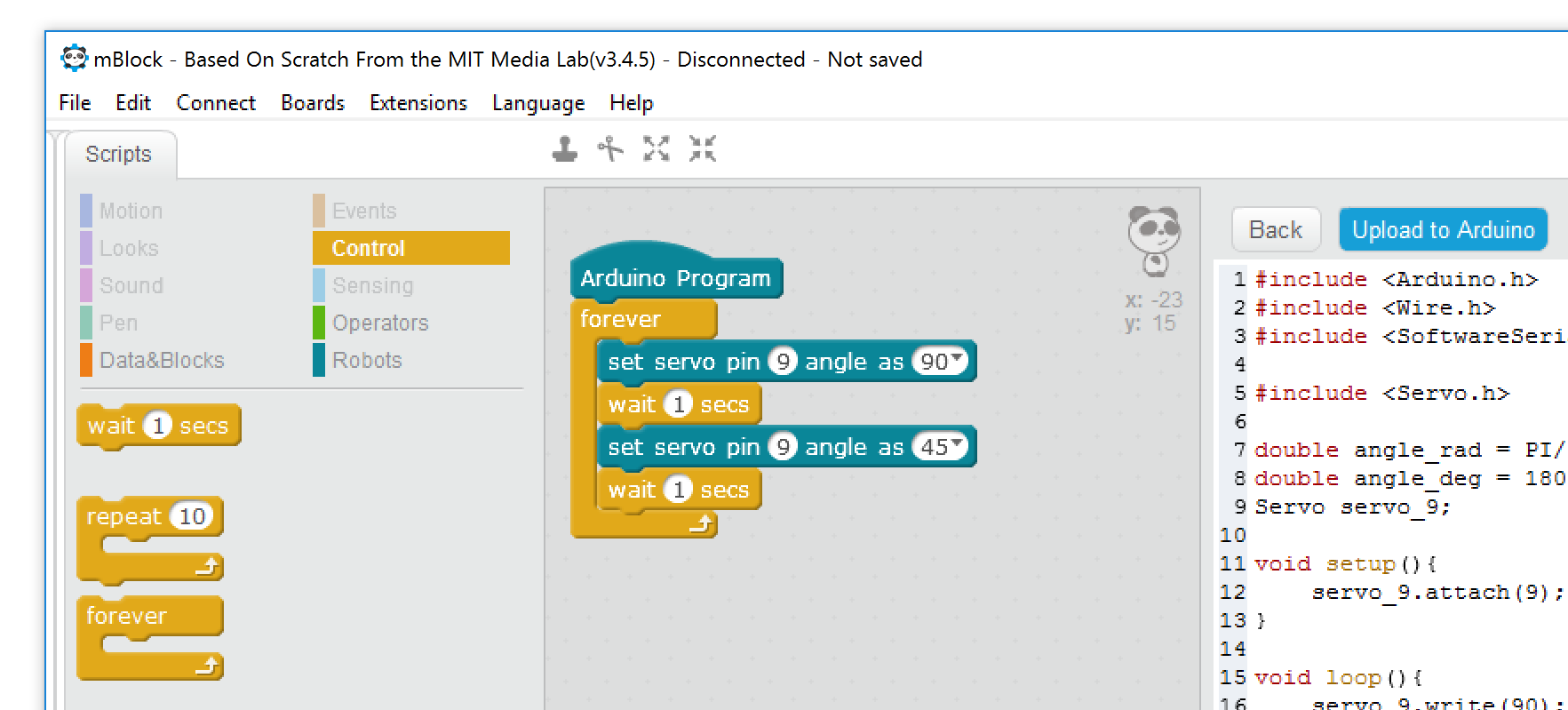
Voor het positioneren van de servomotoren kun je in mBlock het volgende blokje gebruiken:
![]()
Met het bovenstaande blokje zet je de servomotor, die op pin 9 is aangesloten, op 90 graden. Dit getal kun je natuurlijk veranderen. De waarde is altijd een waarde tussen de 0 en de 180.
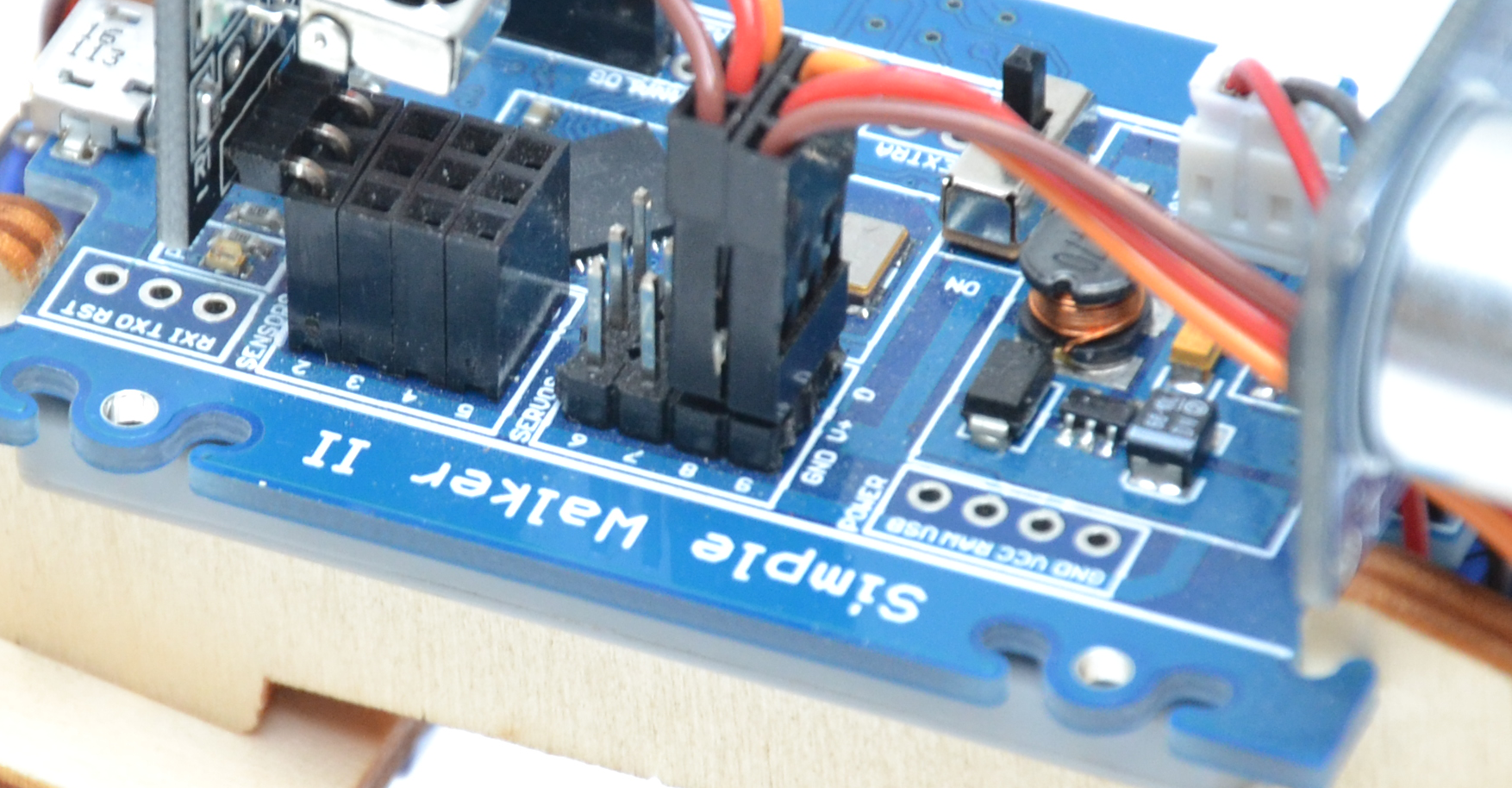
Op de Simple Walker is de voorste servomotor aangesloten op pin 9. De achterste op pin 8.
Eerst laat je de voorste servo van de Simple Walker tussen 45 en 90 graden heen en weer bewegen. Volg hiervoor de volgende stappen:
Opdrachten
Opdracht 1
Het volgende filmpje laat de loopbeweging van de Simple Walker in slowmotion zien.
De loopbeweging begint met de voorste servo die rechtsom draait. Wat gebeurt er daarna?
Maak een mBlock-sketch die de Simple Walker vooruit laat lopen. Sla de opdracht op als Lesbrief2Opdracht1.sb.
Opdracht 2
Laat de Simple Walker achteruit lopen. Sla de opdracht op als Lesbrief2Opdracht2.sb.
Bonus
Waarschijnlijk loopt de Simple Walker niet prefect rechtdoor, maar met een bochtje. Hoe komt dat? Kan je de code zo aanpassen dat de Simple Walker wel rechtdoor loopt?