Stap 4, Obstakels vermijden
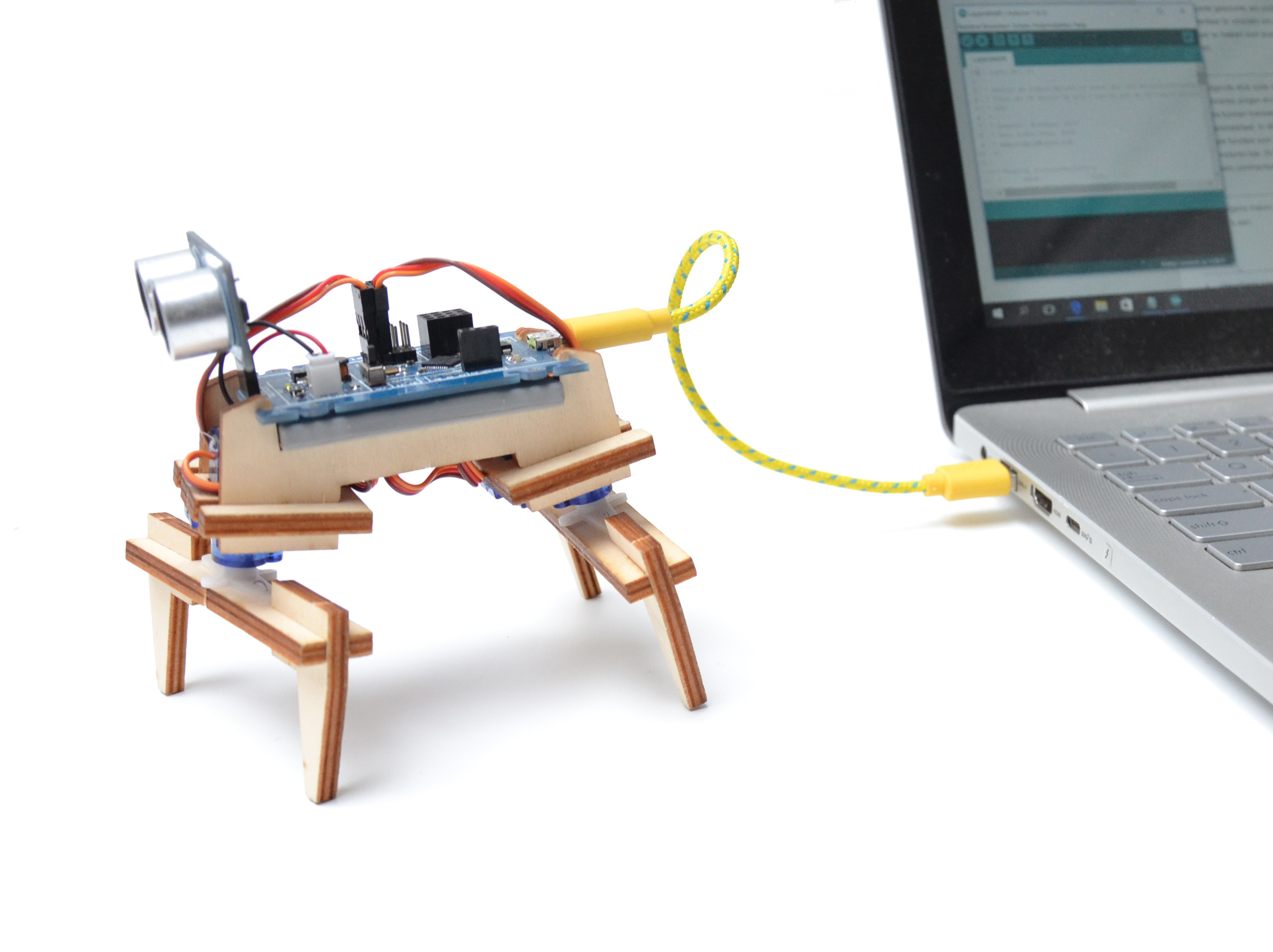
De Simple Walker II heeft ook een ultrasone sensor. Daarmee kan hij voorwerpen detecteren die voor hem liggen.

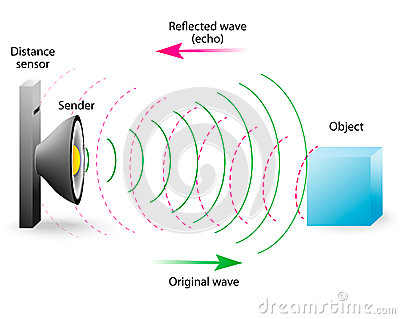
De ultrasone sensor werkt met geluidsgolven van frequenties die niet door onze (menselijke) oren kunnen worden waargenomen. Dit gaat om golven met een frequentie tussen de 18 kHz en 200 kHz. Via de sensor wordt een ultrasone golf verzonden door een transmitter. Door reflectie op een voorwerp krijg je een echo van deze geluidsgolf. Door de tijd tussen het verzenden en het ontvangen van de geluidsgolf te meten kan je de afstand bepalen.
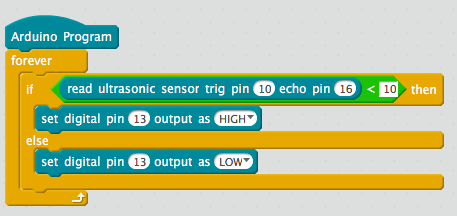
De ultrasone sensor is in mBlock vrij makkelijk te gebruiken. Je hebt hier namelijk het volgende blokje voor:
![]()
In tegenstelling tot het lampje en de servo-motoren geef je hier twee pinnummers mee. Een pinnummer voor het verzenden van de geluidsgevolgen en een pin voor het ontvangen van de echo. Op de Simple Walker II hebben we pin 10 voor het verzenden (trig) en pin 16 voor het ontvangen (echo). We beginnen met een programma dat een lampje laat branden als de robot iets ziet binnen een afstand van 10 cm:
Opdrachten
Opdracht 1
Ga na of het bovenstaande programma werkt door het op de robot te zetten.
Zorg er nu voor dat je robot vooruit gaat, totdat hij iets ziet binnen een afstand van 10 cm. Stop dan.
Opdracht 6
Programmeer de robot zodat hij vooruit loopt, tenzij hij iets tegenkomt (binnen een afstand van 15 cm). Dan moet hij namelijk een paar stappen achteruit lopen.